

Occupational Ergonomics and Biomechanics (OEB) Laboratories

Explore the Virtual Reality space here!
About the Laboratories
The Occupational Ergonomics and Biomechanics (OEB) Laboratories conduct work in theoretical and applied ergonomics, occupational biomechanics, and work physiology, primarily relating to the worksite, workstation, and equipment evaluation and design. Specifically, research is focused on:
- Biomechanics of the human body (modeling, strength, and working motions);
- Human engineering of systems, equipment, tools, workstations, and work tasks;
- Ergonomic design for safety, efficiency, and performance.
Major application domains for the work in the laboratories are manufacturing, construction, and healthcare. The OEB Labs consists of several rooms, which each house various types of equipment needed for research, development, and evaluation.
Motion Capture with XSENS
Researchers in the OEB labs often use motion capture to assess human body kinematics during specific tasks. Common tools include the Vicon system (Umall Lab) or Qualysis system (Gait Lab) which use 3D marker-based motion capture methods as well as the xSens system which uses inertial measurement units to track the motion of body segments (xSens system is shown tracking human body motion in the videos below).
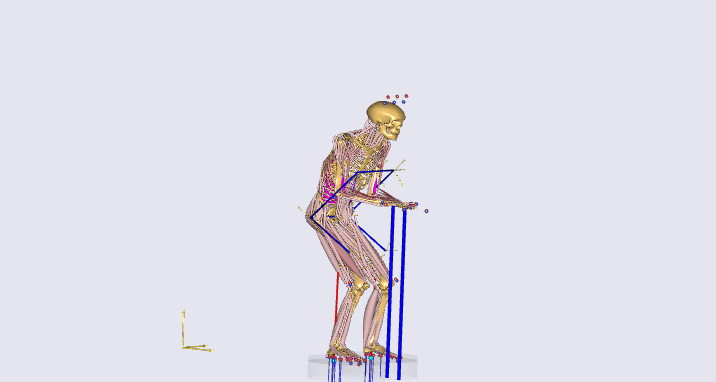
Musculoskeletal Modeling
Using software tools such as OpenSim or the AnyBody Modeling SystemTM (shown in the image), researchers in our lab conduct simulation-based musculoskeletal modeling to extend lab-based measurements by evaluating internal human body properties such as muscle activity and joint forces during tasks. Additionally, these tools allow for researchers to investigate the impact of both real and theoretical assistive devices, such as exoskeletons (simplified model shown by the blue frame in the image), on human performance.
Dynamometer and Exoskeleton Torque/Assistance Evaluation
Exoskeletons are wearable assistive devices that are designed to support and/or enhance human physical capabilities during various tasks. Passive, or unpowered, exoskeletons are purely mechanical devices that provide assistive torques and/or forces to attached body segments. Thus, in order to fully understand and model the impact of exoskeleton assistance on human body loading or performance, it is critical to first understand the mechanical behavior of the exoskeleton and the manner is which exoskeletons connect to the human body. The figure shows an experimental setup used to evaluate the torque assistance provided by a back-support exoskeleton using a dynamometer and mannequin.

Motor Control Training and Evaluation in VR
In the image shown an OEB lab researcher holds onto a Baxter robot and moves its arms, while wearing a VR headset. What they are trying to do is to balance a virtual ball on a virtual plate, while moving it from one location to the other. It is a somewhat tricky motor-control task, and we want to see how such a task affects the operator's mental workload (by measuring their pupil diameter) and their eye-gaze behavior. This study evaluates how eye-gaze behavior and pupil diameter change if the task is easy vs difficult, and also over time, as the person gets better at the task.
Since future industrial workers will likely be working alongside robots, we want to figure out ways to unobtrusively and continuously measure their mental workload while they do so. Eye-tracking is becoming more and more ubiquitous, and can allow a person to move freely, which is why we're so interested in it. Maybe some features of eye-tracking data could be fed back into the robot, which could then adaptively change its behavior depending on whether the operator's mental workload is registered as 'low' or 'high'!

VT Balance Training System
Slips, trips, and falls are the leading cause of injuries in the workplace and among adults aged 65+. In the OEB Gait lab, we study the biomechanics and neuromuscular control of human movement to better understand the how fall-related risk factors contribute to these accidents, and use this knowledge to develop targeted interventions aimed at reducing the fall risk.